
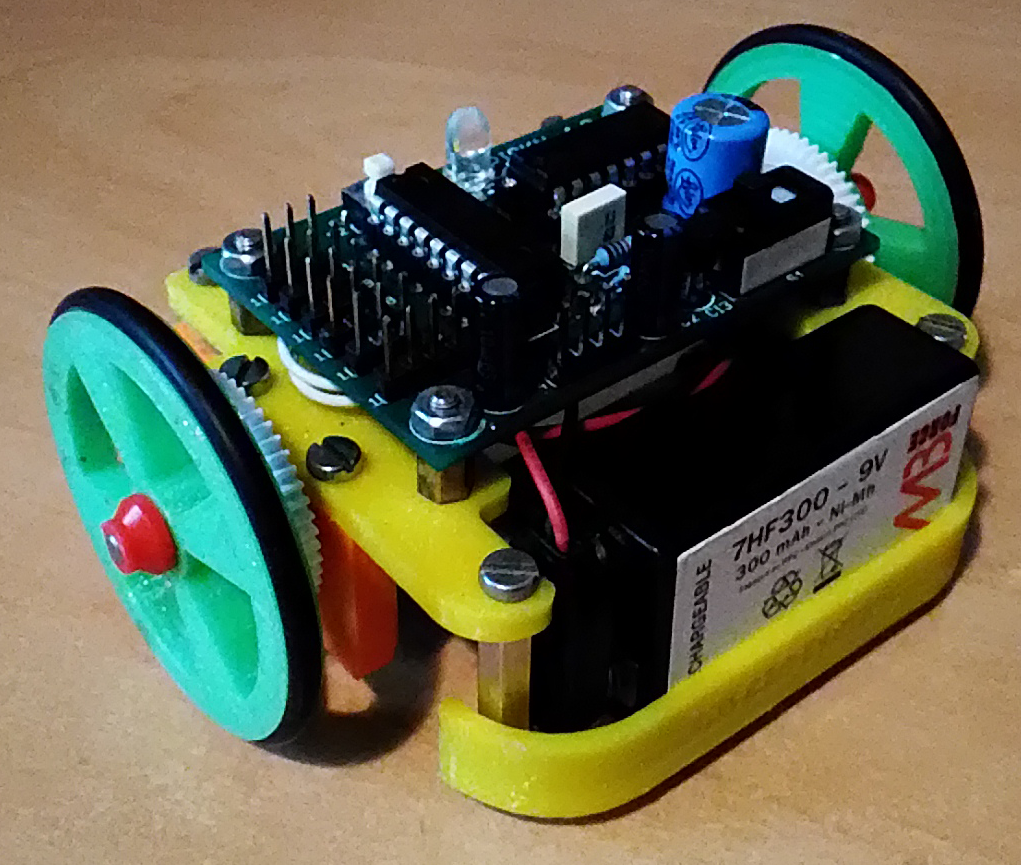
Pour exploiter la carte Picky dans une plateforme robotique, nous avons développé une réalisation simple et peu couteuse. L’utilisation d’une imprimante 3D a permis de réaliser l’ensemble des pièces.
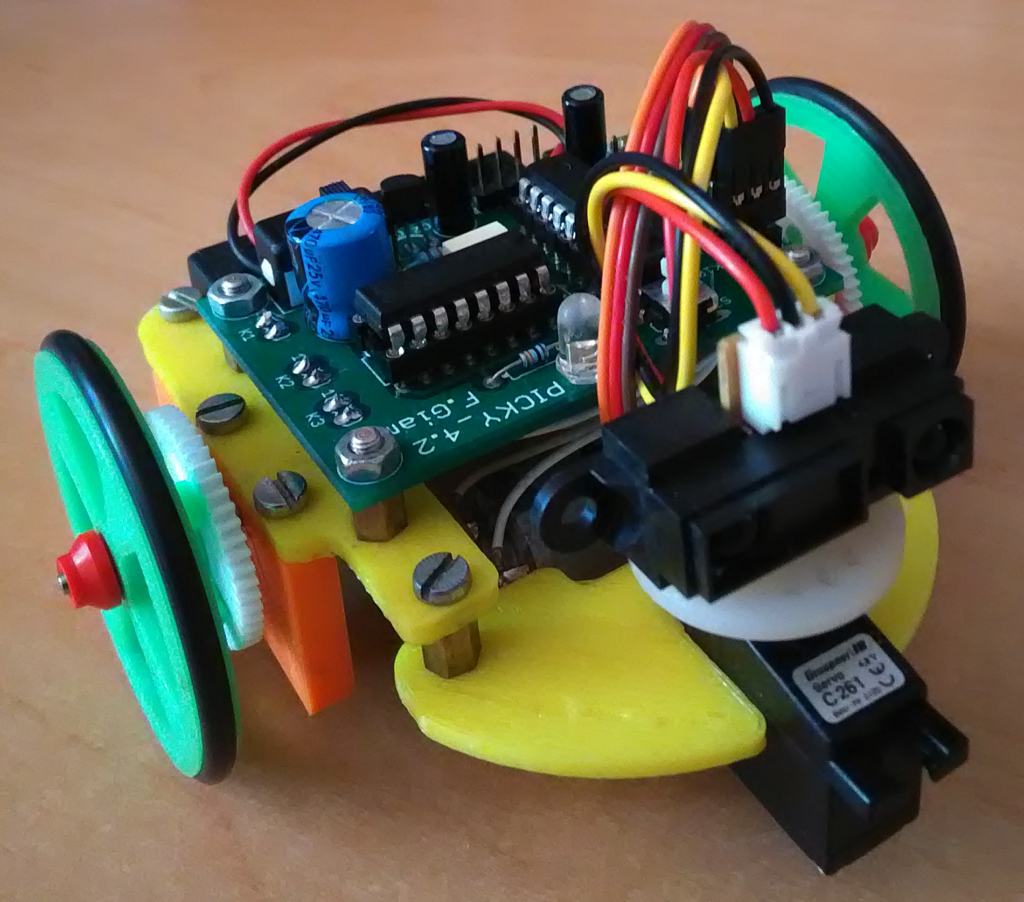
Un premier exemple complète la plateforme. Nous avons réalisé un support pour un servomoteur qui porte un télémètre Sharp. Un programme adapté permettra de réaliser un robot capable de se déplacer entre des obstacles.

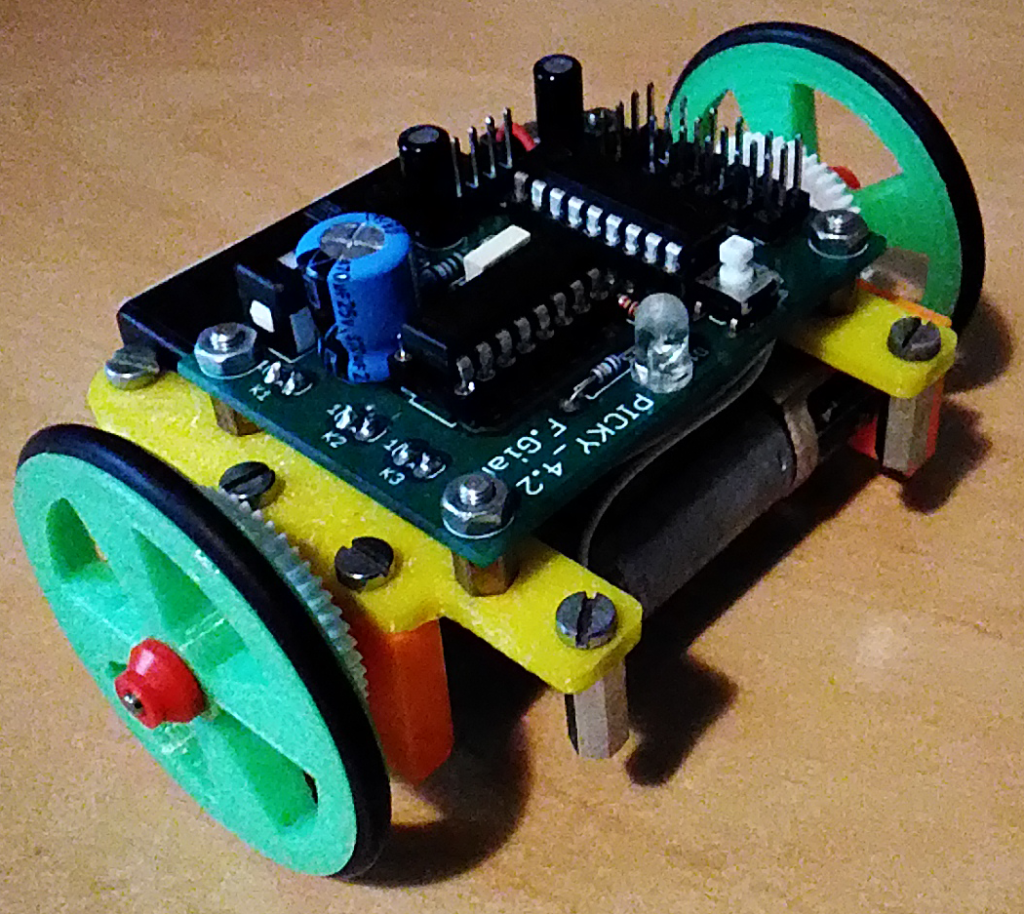
Ce deuxième exemple représente un robot suiveur de ligne rapide. Sa vitesse maximale est de 4m/s. Il est parfait pour participer à une compétition de robotique.