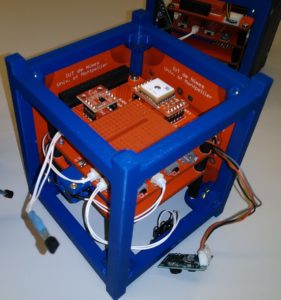
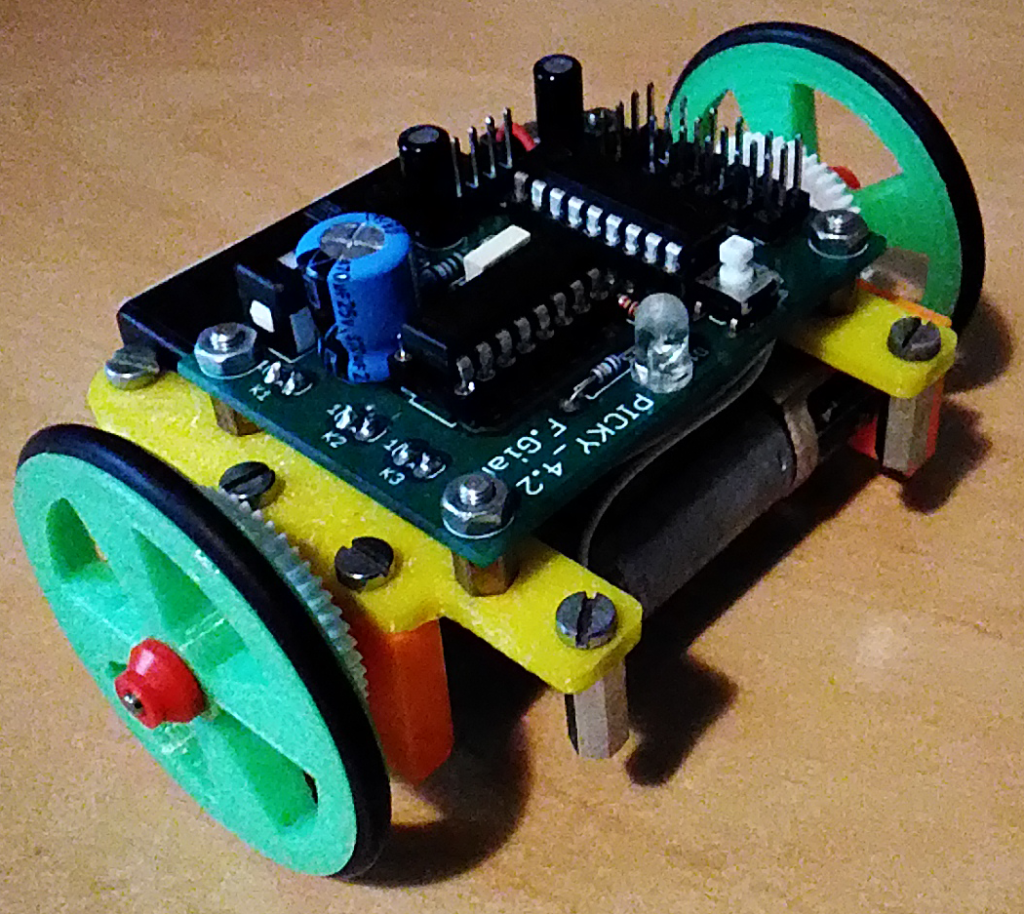
Voici la dernière version de la série des cartes à µC PIC pour la robotique, développée au département GEII de l’IUT de Nîmes.
Cette carte sera utilisée pour les divers projets tuteurés et dans le module Étude et Réalisation au 2ème semestre (ERS2), dont le thème sera la robotique. Elle peut parfaitement permettre de réaliser un robot suiveur de ligne, un robot sumo ou encore un robot pour résoudre des labyrinthes. Bref, elle peut vous permettre de participer au tournoi national de robotique, organisé par l’association TNRS et le département GEII de l’IUT de Nîmes.
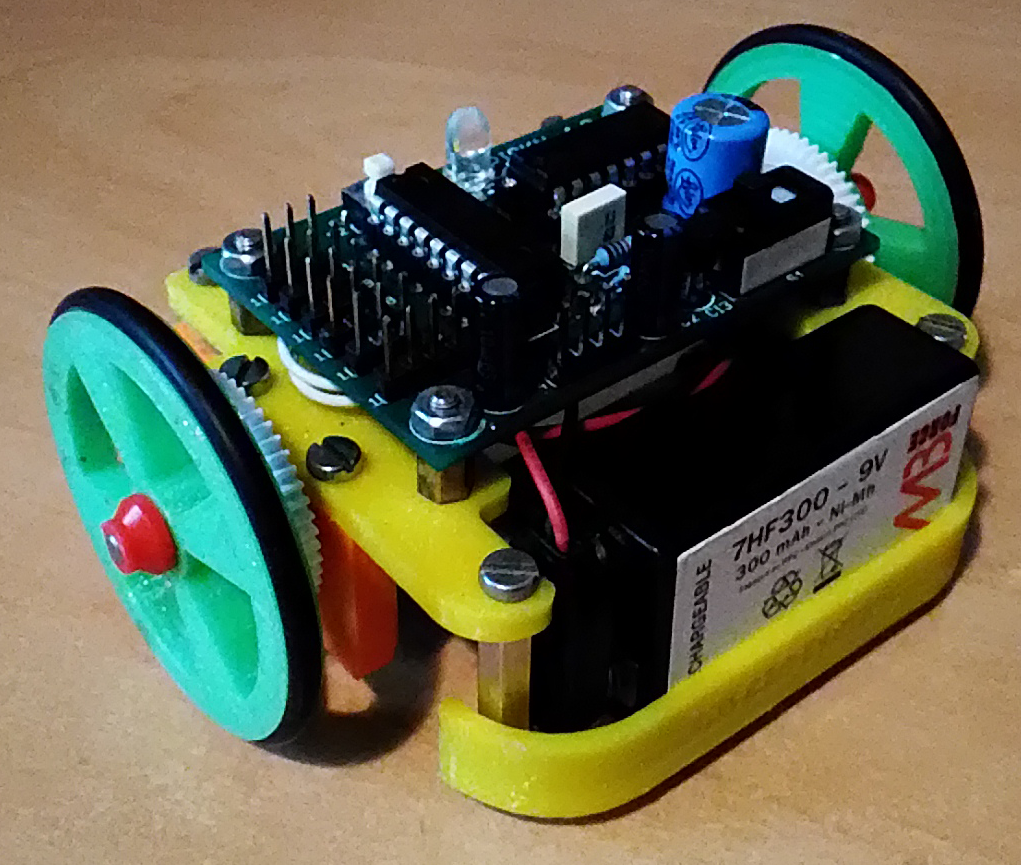
On y retrouve les ressources indispensables pour réaliser un petit robot digne de ce nom.
- µC PIC16F1847P avec fréquence max de 32MHz
- Interface pour 2 moteurs 600mA (ou 1A) max
- Régulateur de tension 5Volts
- Interrupteur général
- Protection contre les inversions de polarité de la source
- IHM : Bouton poussoir, DEL et liaison UART (option Bluetooth disponible)
- Mesure de la tension d’alimentation
- 7 lignes configurables en entrées/sorties, ou 5 E/S et une liaison I2C
- Alimentation 13Volts max, Consommation : 30mA
- Dimension : 60mm x 40mm
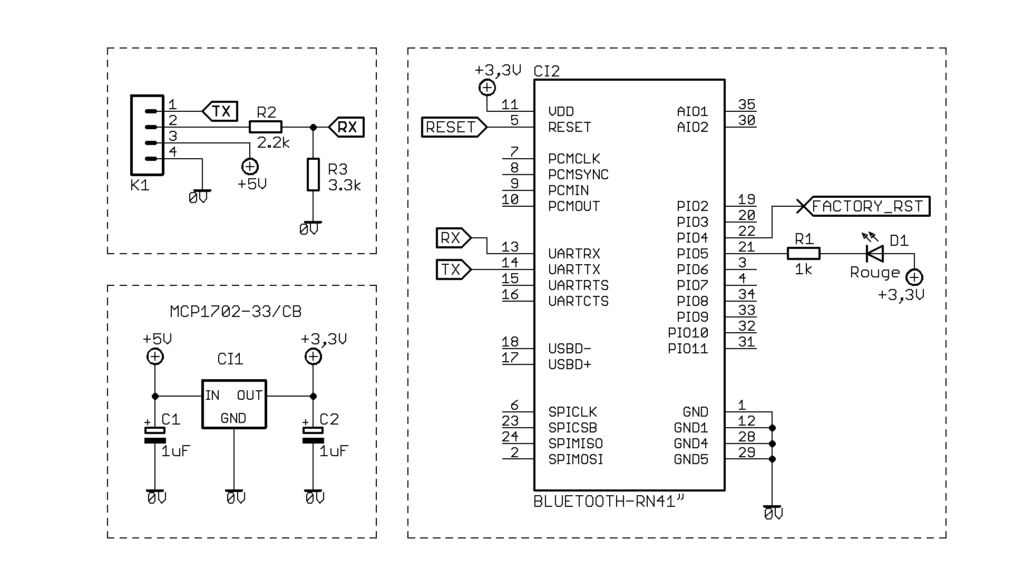
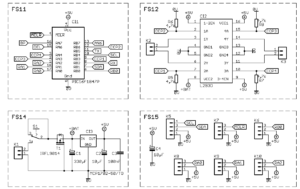
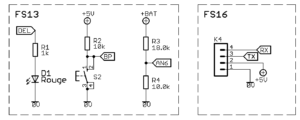
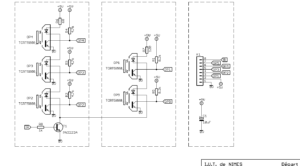
La figure suivante correspond au schéma électronique de cette nouvelle version.
Le développement de cette carte a commencé en 2004. Mais des versions plus élaborées ont été développées en parallèle et utilisées depuis pour des robots plus puissants et pour la pédagogie en 1ère et 2ème année.
Pour réaliser et utiliser cette carte, demander à l’enseignant responsable de la partie robotique. Il pourra vous fournir les documents nécessaires à sa réalisation et une trame de programmation pour tester la carte.
Trame de Programmation pour Picky 4.2
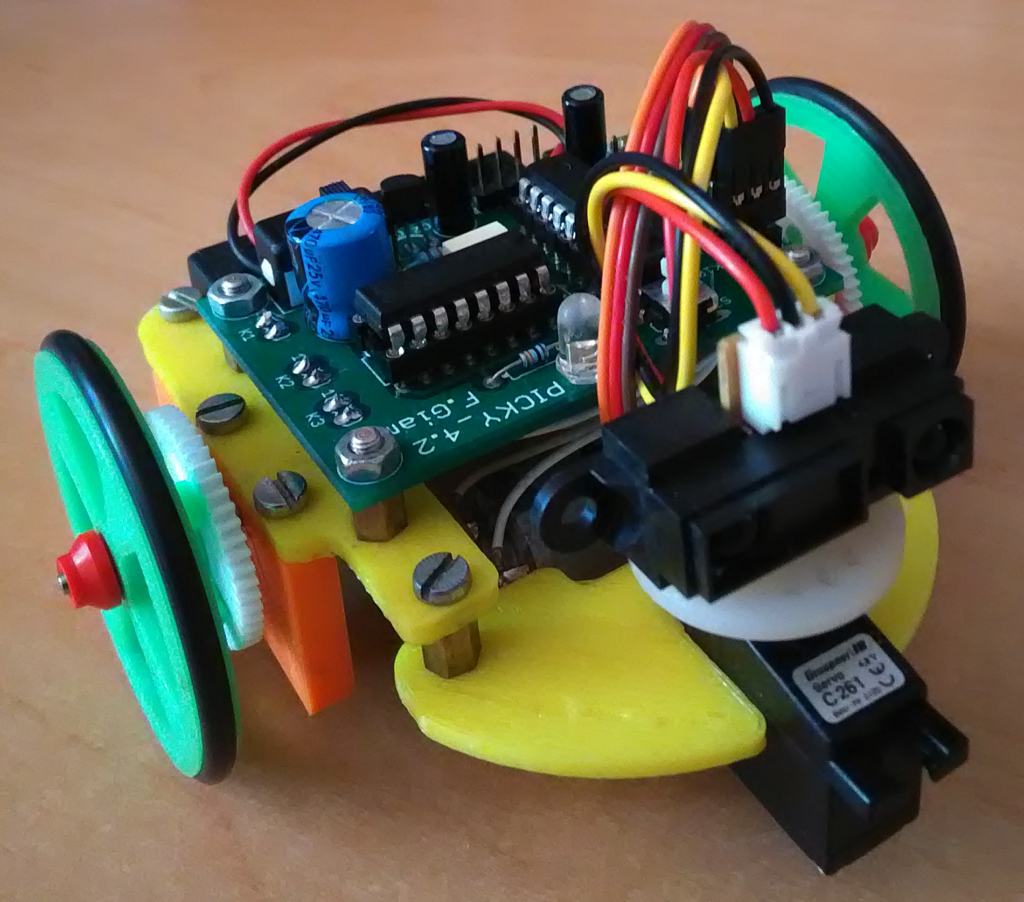
Carte à 5 capteurs pour suiveur de ligne
Associée à la carte à µC comme celle présentée plus haut, elle permet de lire 5 capteurs à réflexion orientés vers le sol. L’émission infrarouge est commandée par une ligne. De ce fait, en l’absence d’une lecture des capteurs, on peut réduire la consommation de la carte. Cette dernière n’étant pas négligeable, de l’ordre de 45mA.